Inertial Navigation System Ins Toolbox

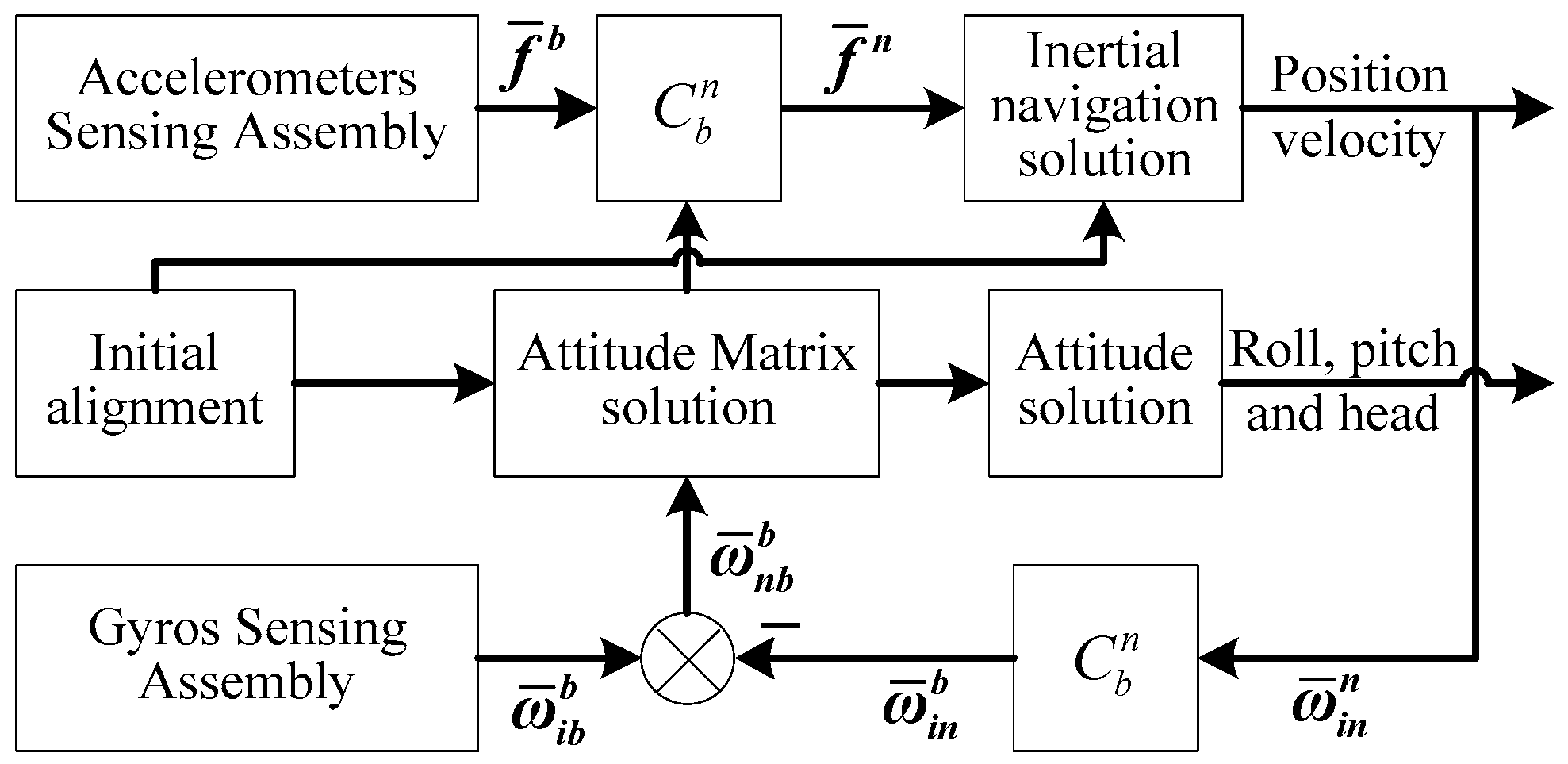
Diagram Of A Strapdown Inertial Navigation System Download Scientific Diagram

Model Imu Gps And Ins Gps Matlab Simulink Mathworks Espana

Mems Inertial Navigation Systems For Aircraft Sciencedirect

Inertial Navigation System Ins Toolbox Simulation And Analysis Software Third Party Products Services Matlab Simulink

Ins Toolbox V3 0 For Matlab Navtechgps

Pdf Improving The Inertial Navigation System Ins Error Model For Ins And Ins Dgps Applications Microform
Inertial navigation system ins traditionally 1960 s and 70 s referred to a self contained navigation system utilising a gyro stabilised platform for dead reckoning and with a pilot interface allowing a limited number of waypoints to be entered and basic navigation information to be displayed.
Inertial navigation system ins toolbox.

Inertial Navigation System Ins Ppt Download

Inervis
Pdf Inertial Navigation System Global Positioning System Fusion Algorithm Design In A Fast Prototyping Environment Towards A Real Time Implementation

Inertial Navigation System Of A Concorde Jet Navigation System Aviation Humor Navigation

Pdf A Toolbox Of Aiding Techniques For The Hugin Auv Integrated Inertial Navigation System Semantic Scholar
Pdf Multi Sensor Inertial Navigation Systems Employing Skewed Redundant Inertial Sensors
Pdf Mathematical Model And Matlab Simulation Of Strapdown Inertial Navigation System

A Sas System Combining Micronavigation And Aided Inertial Navigation Download Scientific Diagram
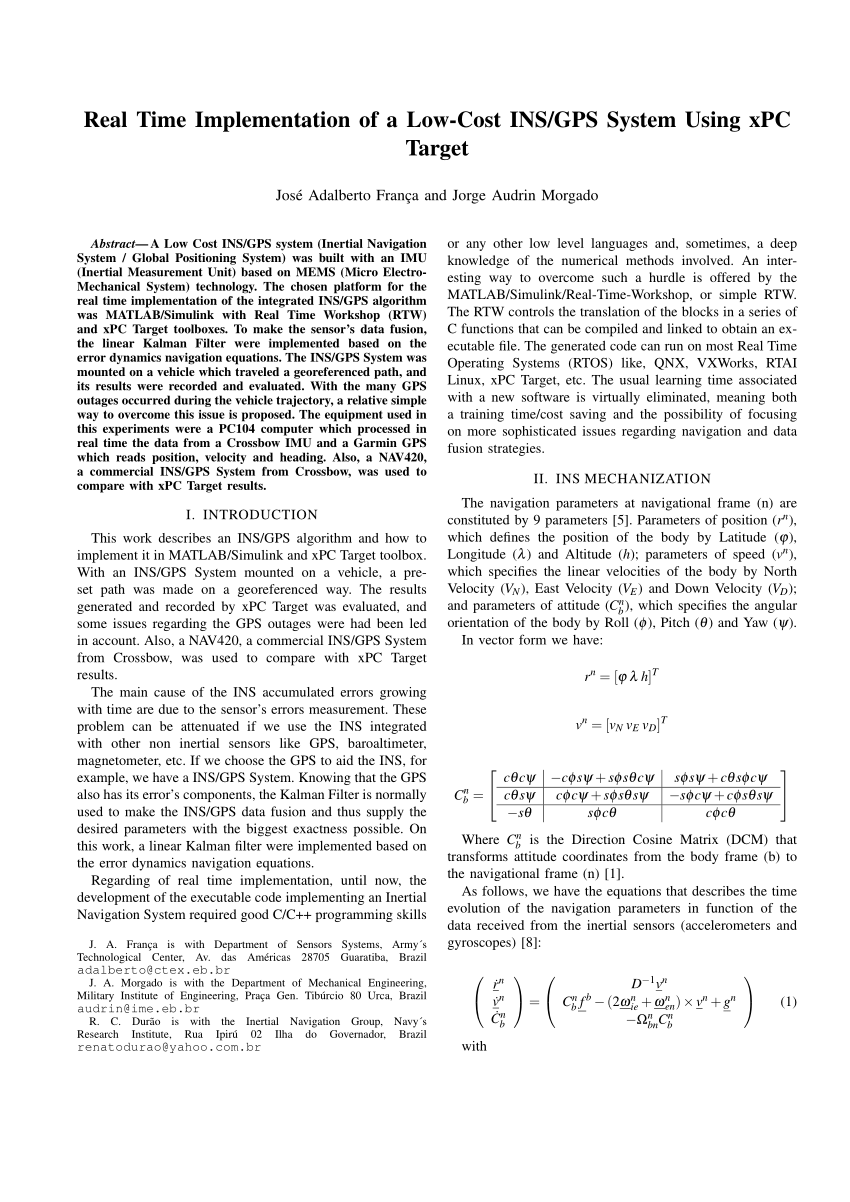
Pdf Real Time Implementation Of A Low Cost Ins Gps System Using Xpc Target
Wavelet Based Pre Filtering For Low Cost Inertial Sensors Scialert Responsive Version
Http Eej Aut Ac Ir Article 824 C7863126db2461da98fa33f8b3c8dd70 Pdf
Fundamentals Of Satellite And Inertial Navigation Manualzz
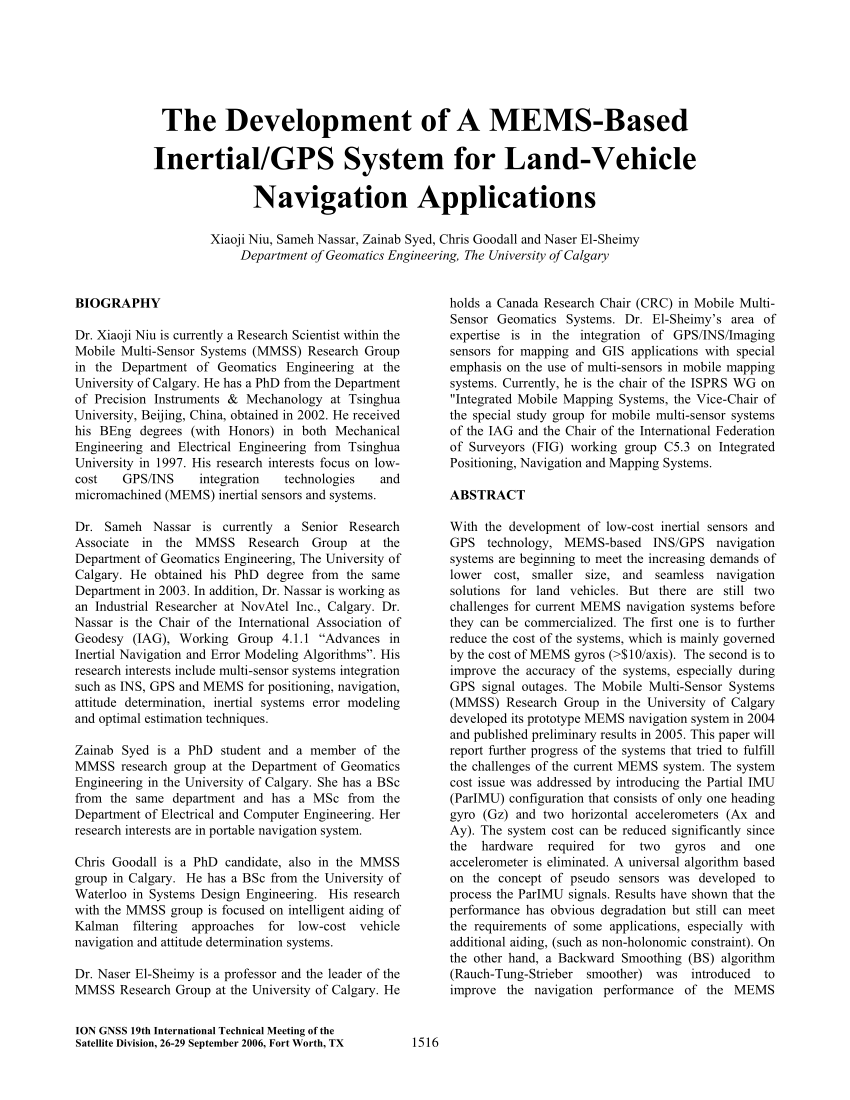
Pdf The Development Of A Mems Based Inertial Gps System For Land Vehicle Navigation Applications
Pdf Doppler Water Track Aided Inertial Navigation For Autonomous Underwater Vehicle
Pdf Navego A Simulation Framework For Low Cost Integrated Navigation Systems
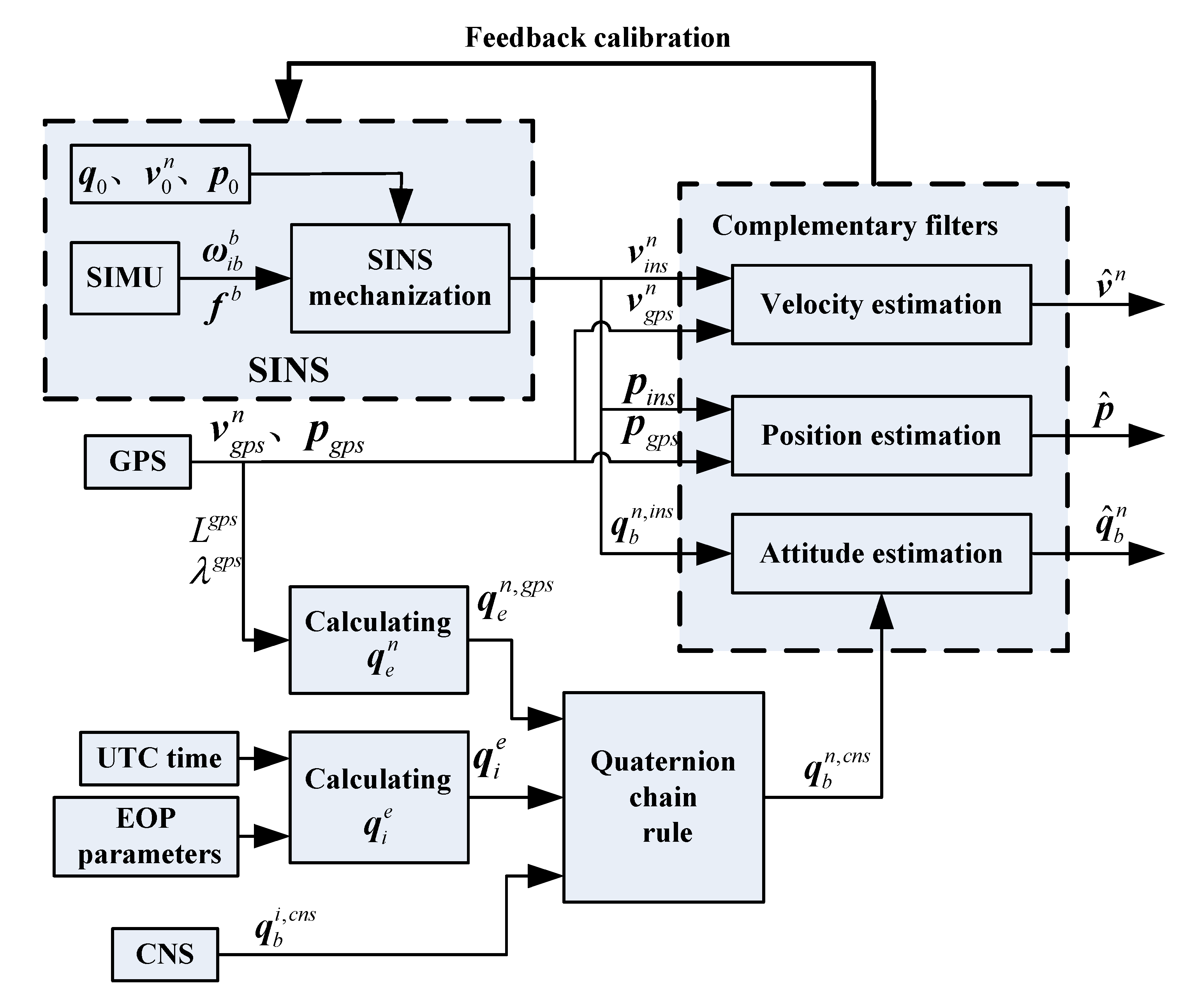
Sensors Free Full Text Information Fusion Based On Complementary Filter For Sins Cns Gps Integrated Navigation System Of Aerospace Plane Html

Inertial Navigation System Ins Global Market Research And Forecast 2015 2025 Navigation System Navigation Strategic Marketing
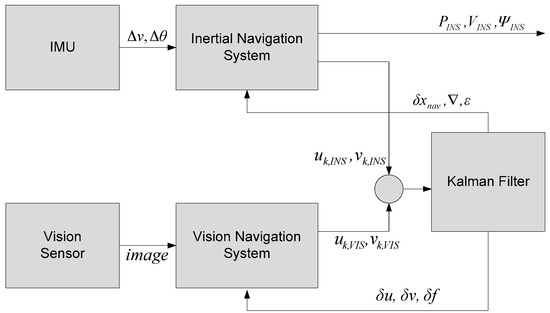
Sensors Free Full Text Vision Ins Integrated Navigation System For Poor Vision Navigation Environments Html
Https Encrypted Tbn0 Gstatic Com Images Q Tbn And9gctp3frltwy5k0afe8ufo S Ymvhrueovgwbi3p4wuq7ddcer5fv Usqp Cau

Optimal Filtering With Kalman Filters And Smoothers A Manual For The
Applied Sciences Free Full Text A General Euler Angle Error Model Of Strapdown Inertial Navigation Systems Html

Pdf Performance Assessment Of An Ultra Low Cost Inertial Measurement Unit For Ground Vehicle Navigation
Http Www Ijeijournal Com Papers V2i12 N020127682 Pdf
Https Arxiv Org Pdf 1905 11615
Source : pinterest.com
